Bahagian luar Myvi yang anda tengok ini mungkin nampak seperti diubah suai sedikit sahaja, tapi sebenarnya perkara yang lebih penting adalah di bawah hudnya. Ia adalah sebuah prototaip yang dibuat oleh Universiti Teknologi Mara (UiTM) untuk kajian berkenaan kenderaan autonomous, dipanggil sebagai Urban Intelligent Mobile Autonomous Vehicle II, atau AVII.
Kenderaan ini dibina dengan kolaborasi antara empat fakulti iaitu kejuruteraan elektrikal, kejuruteraan mekanikal, seni reka bentuk dan sains matematik, dan dibayangkan sebagai “sebuah kenderaan elektrik autonomous masa hadapan inovatif yang dibangunkan oleh warga tempatan, serta cekap untuk mengemudi dalam jarak jauh dengan campur tangan yang minimal oleh manusia.”
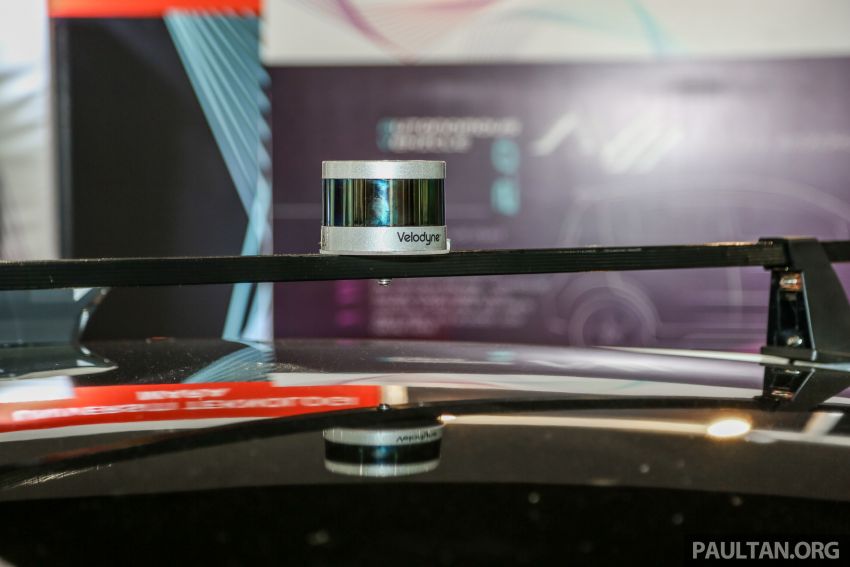
Ada pelbagai kelengkapan pemanduan autonomous pada kenderaan ini termasuk unit pengesan cahaya dan jarak (LIDAR) Velodyne VLP-16, yang boleh menghasilkan imej 3D 360 darjah melalui input yang didapati daripada 16 pengesan/laser.



Turut dipasang adalah unit pengukur inertia, yang membantu menetapkan arah tujuan, manakala sistem GPS Emlid pula menyediakan kepekaan kedudukan yang diperlukan. Selain itu, terdapat juga kamera point-grey untuk kepekaan lorong, penentu jarak laser, pengesan ultrasonik dan kit pengesan kod berpusing. Kemampuan autonomous kenderaan ini terdapat pada bahagian stereng, pendikit, perancangan laluan dan navigasi, pengesan lorong serta pengesan objek.
AVII boleh memuatkan empat orang didalamnya dan mempunyai berat keseluruhan 1,000 kg. Ia direka semata-mata untuk kajian berkenaan pemanduan autonomous, tetapi ada juga satu lagi kajian yang boleh dilakukan menggunakannya iaitu berkenaan kenderaan elektrik. Padanya terdapat motor DC asynchronous 48 volt lima hp yang mendapat kuasa daripada bateri lead-acid 8.1 kWh.
Jarak pergerakan dengan sekali cas penuh (boleh dilakukan dalam masa lima jam menggunakan soket tiga pin 240V rumah biasa) adalah 50 km, dan ia boleh bergerak sehingga kelajuan maksimum 30 km/j. Walaupun begitu, kelajuannya dihadkan kepada 25 km/j sahaja setakat ini.